
Pretty interesting video of IR signatures...
+5
Stealthflanker
nemrod
GarryB
NationalRus
Admin
9 posters
Modern Fighter IR Signature and IRST systems

Admin- Posts : 2926
Points : 3798
Join date : 2009-07-10


NationalRus- Posts : 610
Points : 611
Join date : 2010-04-11
well well well, must have somthing to do of the matirial of which the rafale is made of, but anyway, to locate fighters/planes what ever in the sky is flir only effective if the plane is in visual range
Admin- Posts : 2926
Points : 3798
Join date : 2009-07-10
3rd generation FLIRs can locate in the BVR today.

GarryB- Posts : 40487
Points : 40987
Join date : 2010-03-30
Location : New Zealand
The US developed long wave IR pods for the F-16 because it was discovered that in some specific circumstances the Mig-29 could detect an F-16 at longer range with its IRST than it could with its radar.
In the cool clear air above 10,000m where the outside temperature is -60 degrees C and there is no cloud or weather it is very easy to use passive IR sensors to see very long range.
In the cool clear air above 10,000m where the outside temperature is -60 degrees C and there is no cloud or weather it is very easy to use passive IR sensors to see very long range.
GarryB- Posts : 40487
Points : 40987
Join date : 2010-03-30
Location : New Zealand
My broadband has kicked back up to full speed and now I can see the video.
First of all it is highly questionable if all that footage was thermal.
The footage of the Serbian Mig-29 on the ground just looked like black and white video footage for instance.
Second all the aircraft were completely visible in the IR spectrum, there are no prizes for being brighter or dimmer, very simply there is visible and not visible and all were visible.
BTW an IR invisible aircraft would still not be safe because modern IR guided missiles chase images rather than hotspots so a black patch that emits no IR is just as easy to target as a white patch that is emitting enormous amounts of heat.
Also note on the video the nose avionics bay of the Typhoon glowing... most aircraft that are going to have AESA radars will have that glow too, unless they keep it switched off.
First of all it is highly questionable if all that footage was thermal.
The footage of the Serbian Mig-29 on the ground just looked like black and white video footage for instance.
Second all the aircraft were completely visible in the IR spectrum, there are no prizes for being brighter or dimmer, very simply there is visible and not visible and all were visible.
BTW an IR invisible aircraft would still not be safe because modern IR guided missiles chase images rather than hotspots so a black patch that emits no IR is just as easy to target as a white patch that is emitting enormous amounts of heat.
Also note on the video the nose avionics bay of the Typhoon glowing... most aircraft that are going to have AESA radars will have that glow too, unless they keep it switched off.
Admin- Posts : 2926
Points : 3798
Join date : 2009-07-10
In this age of LO and VLO RCS signatures, I would say IR signatures are becoming more and more important. A quality 3rd gen IRST can detect aircraft at the extreme ranges of modern BVRAAMs. The larger the IR signature the greater the range they will be detected. With missiles like IR MICA coming on the market slaved to an IRST, an LO fighter like Rafale can take out anything from PAK FA to F-22s at great range before they will be detected. Their launch will also not have any radar emissions to set off TWRs.
GarryB- Posts : 40487
Points : 40987
Join date : 2010-03-30
Location : New Zealand
I agree that IR is important but it is no where near as all weather as radar and it has nothing like the range of radar... plus there is no way to determine range with IR so as a detection system it is good, but for guidance and shooting things down it is limited.
Not all combat is at high altitude, and at sea level there are things called rain storms and monsoons where IR detection range is very much reduced. In addition to detection there is identification too.
Not all combat is at high altitude, and at sea level there are things called rain storms and monsoons where IR detection range is very much reduced. In addition to detection there is identification too.
Admin- Posts : 2926
Points : 3798
Join date : 2009-07-10
IR is all weather. IRST cannot be jammed, unlike radar.
There is a way to determine range, it is called a laser range finder. The OSF of the Rafale can give launch coordinates to an IR MICA at its extreme range. This system is quite good as there is proof the F-22 was locked with this system.
Things like rain storms and monsoons obviously distort a radar, so even there it is better to have an IRST against a fighter you will never get a radar lock on.
There is a way to determine range, it is called a laser range finder. The OSF of the Rafale can give launch coordinates to an IR MICA at its extreme range. This system is quite good as there is proof the F-22 was locked with this system.
Things like rain storms and monsoons obviously distort a radar, so even there it is better to have an IRST against a fighter you will never get a radar lock on.
GarryB- Posts : 40487
Points : 40987
Join date : 2010-03-30
Location : New Zealand
Ir is much higher frequency than radar and is very near light, and is effected by many of the things that effect light. A thermal imager can't see through water, or glass and is definitely effected by moisture in the air.
It is ideal at high altitude above the weather, and for use against a super cruiseing F-22 it is probably the best sensor to use because for an F-22 to super cruise it must fly high and by flying supersonically lots of parts will be heated by friction in the front of the aircraft making it more visible from the front.
The issue is of course that using a laser to get range information means you are no longer passive, and the powerful AESA radar on the F-22 will pick out most other aircraft at much longer range than those aircraft can see it.
Also any IR seeker can be dazzled with DIRCM systems.
That is not to say it is useless, just as stealth aircraft don't make radar guided systems useless either.
The fact remains that radar is the most reliable long range all weather detection sensor and will remain so for some time.
It is ideal at high altitude above the weather, and for use against a super cruiseing F-22 it is probably the best sensor to use because for an F-22 to super cruise it must fly high and by flying supersonically lots of parts will be heated by friction in the front of the aircraft making it more visible from the front.
The issue is of course that using a laser to get range information means you are no longer passive, and the powerful AESA radar on the F-22 will pick out most other aircraft at much longer range than those aircraft can see it.
Also any IR seeker can be dazzled with DIRCM systems.
That is not to say it is useless, just as stealth aircraft don't make radar guided systems useless either.
The fact remains that radar is the most reliable long range all weather detection sensor and will remain so for some time.
Admin- Posts : 2926
Points : 3798
Join date : 2009-07-10
It can see through water, it can see through glass and walls too if the variation is great enough. It detects variations of thermal temperatures no matter where they are. Having cool moisture in the air with a hot object contrasting in the middle of it will show up just as well without it. If you are flying through steam of a volcano it might have a problem.
LRFs are quite passive, it is not like lasing a target to guide ordinance. That requires far more power and continuous pulse. LRFs are extreme low power and only require a few pulses. There is no TWR that I know of that can detect an LRF.
LRFs are quite passive, it is not like lasing a target to guide ordinance. That requires far more power and continuous pulse. LRFs are extreme low power and only require a few pulses. There is no TWR that I know of that can detect an LRF.
GarryB- Posts : 40487
Points : 40987
Join date : 2010-03-30
Location : New Zealand
I am sorry, but that is not true about water and glass...
If IR energy could flow through water then why bother with Sonobouys and sound waves to detect Submarines?
IR sensors like thermal imagers and IRSTs detect the energy emitted by all objects that have a temperature above 0 degrees Kelvin (ie absolute zero). In this part of the universe that means everything.
Those emitted IR waves are reflected by glass and water, they don't penetrate them, they bounce off them.
That is why thermal imagers need special crystal lenses that are not made of glass otherwise instead of a lens you have a mirror.
There are basically two windows of emission in the Earths atmosphere, two frequency ranges where IR energy travels efficiently through the air. The T-90 tank is getting two French thermal sights that operate in both frequency ranges because each range has its advantages and disadvantages. From memory the lower frequency requires the detector to be much colder and is more expensive but sees better through smoke and dust and I think that is used for the Gunner, while the other higher frequency window requires less cooling and provides a good picture at reduced costs/increased simplicity of design.
You don't need to take my word on it:
Regarding water and glass:
(source: [url=http://www hortonlevi.co.uk/thermal_imaging/default.htm]http://www hortonlevi.co.uk/thermal_imaging/default.htm[/url] ... to make the link work restore the dot after the www)
If IR energy could flow through water then why bother with Sonobouys and sound waves to detect Submarines?
IR sensors like thermal imagers and IRSTs detect the energy emitted by all objects that have a temperature above 0 degrees Kelvin (ie absolute zero). In this part of the universe that means everything.
Those emitted IR waves are reflected by glass and water, they don't penetrate them, they bounce off them.
That is why thermal imagers need special crystal lenses that are not made of glass otherwise instead of a lens you have a mirror.
There are basically two windows of emission in the Earths atmosphere, two frequency ranges where IR energy travels efficiently through the air. The T-90 tank is getting two French thermal sights that operate in both frequency ranges because each range has its advantages and disadvantages. From memory the lower frequency requires the detector to be much colder and is more expensive but sees better through smoke and dust and I think that is used for the Gunner, while the other higher frequency window requires less cooling and provides a good picture at reduced costs/increased simplicity of design.
You don't need to take my word on it:
(Note the night capable thermal channels have been of interest to the military so far, but with sensor fusion the other two wavelengths are becoming of interest because even though they are day only they can be used in addition to a normal TV camera to reveal camouflaged objects of interest during the day (when camouflage is supposed to work) ).Infrared covers four regions of the spectrum; (a) Near infrared, 0.7 -1 micron, this is nearest to the visible wavelength. (b) Short wave, 1.0 - 2.5 microns. Both of these wavelengths regions rely on reflected solar radiation and can only be used in daylight or illuminated conditions. (c) the Medium or short wave thermal infrared, 3 to 5 microns, detects radiation emitted from objects and can be used in total darkness or daylight. This wavelength is often used for high temperatures such as boilers, kilns etc. (d) the Long wave thermal infrared, 8 -14 microns, is most commonly used in industry since the detectors are efficient at environmental temperatures and can also be used for high temperature operations with appropriate filtering.
Regarding water and glass:
Opaque means you can't see through it, like frosted glass used in windows where privacy is important like shower doors.
Most materials are opaque to medium and long wave infrared including glass and water. Optical materials such as germanium and some other exotic materials such as zinc sulphide, zinc selenide, magnesium fluoride and sapphire are used since they are mostly transparent to the thermal wavelength. These materials are very expensive. Some low grade commercial thermal imagers utilise composite materials to lower the costs but there is no compromise where quality is required. Most military specification thermal imagers use coated germanium and optical magnification rather than digital magnification.
(source: [url=http://www hortonlevi.co.uk/thermal_imaging/default.htm]http://www hortonlevi.co.uk/thermal_imaging/default.htm[/url] ... to make the link work restore the dot after the www)

nemrod- Posts : 839
Points : 1333
Join date : 2012-09-11
Age : 59
https://defenseissues.wordpress.com/2015/06/16/airborne-irst-properties-and-performance/
Airborne IRST properties and performance
Posted by picard578 on June 16, 2015
Introduction
IRST is a sensory device which uses IR (infrared) radiation for detection and targeting purposes. IR radiation has wavelength of 0,75 to 1.000 microns (micrometers), longer than wavelengths of color red in the visible spectrum (visible spectrum ranges from 0,39 to 0,7 microns, with violet at 0,4 and red at 0,7 microns). It is given off by all objects above absolute zero, though objects that are below average temperature of their surroundings will absorb far more IR radiation than they will give out. Unlike FLIR which is a targeting device, IRST can be used for initial detection as well.
Infrared radiation is divided into near infrared (0,75 – 1,4 microns), shortwave infrared (1,4 – 3 microns), midwave infrared (3 – 8 microns), longwave infrared (8 – 15 microns) and far infrared (15 – 1.000 microns). These have different properties. For example, glass is opaque to LWIR band but transparent to SWIR band, and significantly degradess image in MWIR band. MWIR sensors are far better at penetrating fog and clouds than other wavelengths, while LWIR sensors have superior atmospheric performance. As a result, while SWIR sensors can use glass, MWIR and LWIR sensors have to use exotic materials such as germanium and sapphire. 5-7 micron band suffers 100% absorption by water particles.
IR bands are also associated with temperatures of bodies producing radiation. Visible light is associated with temperatures above 1.000 *C. Next come IR bands: 0,7-4 microns (1.000 – 400 *C); 5-25 microns (400 – -150 *C) and 25-350 microns (this is a civilian, not military, division). Bodies at room temperature have radiation peak at around 10 microns, while 3-5 micron band is used in civilian applications for its effectiveness in tropical conditions.
In civillian purposes, astronomers use IR telescopes to penetrate dusty regions of space that block off visible light. NASA also has an airborne IR system – SOFIA (Stratospheric Observatory for Infrared Astronomy) which is flown at altitudes of over 41.000 ft, allowing 85% of the entire IR spectrum to reach it. Its service ceilling is 45.000 ft.
First IRSTs were deployed in 1950s on F-101, F-102 and F-106 interceptors. They were also used in F-8E, F-4 (B and C models only) and Swedish J-35A and J-35F-2 (1965-1967). However, they were primitive and were slaved to the radar, as opposed to modern-day independent systems. Any IR radiation falling on the sensor would generate a blip; consequential high false alarm rate meant that IRST was typically only used for (manual) radar targeting.
In 1960s and 1970s, Soviets deployed IRST units on their MiG-23, MiG-31, Su-27 and MiG-29 fighters. This was intended to provide passive BVR surveillance capability to fighters, and also as a way of countering Western advantage in radar technology and countermeasures. In fact, MiG-23 and MiG-31 interceptors were able to track the SR-71 recon aircraft from large distance, possibly up to 100 kilometers. This was despite the fact that the system was rather primitive, and that MiG-31s own skin and canopy would reach temperatures of over 760 degrees Celsius during the intercepts. MiG-23 had an IRST capable of detecting the F-16 at 35-40 km head on and 60 km from the rear. Later developments of Su-27 and MiG-29 families all have internal IRST.
General IRST properties
Due to relatively shorter wavelength, IRST is more sensitive than radar to adverse weather conditions. Much of the infrared radiation is absorbed by water vapor, carbon dioxide, methane and ozone. However, there are two wavelength “windows” in which very little infrared radiation is absorbed by the atmosphere. These windows are at 3-5 and 8-12 microns. Both modern IRSTs and modern IR missile seekers typically operate in both bands. 3-5 mM band is optimized for detection of aircraft in afterburner, while 8-12 mM band is better suited for detection of subsonic or supercruising aircraft through aerodynamic heating of skin. More specifically, afterburner exhaust plume is more prominent in midwave than in logwave band, with most emissions being in 2-8 mM wavelength band, while emissions from nonafterburning plume are only useful in 4,15-4,2 mM band. Blackbody radiation from a warm object is most prominent in 10-15 mM band, and only objects above ~300 K give appreciable MWIR emissions (still inferior to to LWIR band). As a result, LWIR detectors have good sensitivity against targets at ambient temperatures.
Unlike other IR bands, these two bands are comparatively altitude-insensitive when it comes to detection performance, as it can be seen from an IR absorpion chart in the next section; they are also less affected by clouds. Comparing both bands, 3-5 mM band is less affected by adverse weather conditions while 8-12 mM band has longer detection range. Consequently, up until appearance of dual-band systems, midwave band was preferred for ground attack while longwave band was preferred for air-to-air usage.
While IRSTs can detect even relatively cool targets through thin cloud cover, detection range is reduced (more than it is in case of radar), and thicker clouds can significantly degrade detection range. As a result, IRST is most useful for air superiority fighters, which typically operate at 30.000 ft and above – well above normal cloud cover and in relatively thin atmosphere.* ** Only clouds typically present at altitudes above 8 km (~26.000 ft) are those of cirrus variety, which are IR transparent. While dense cumulonimbus clouds can reach extreme heights (60.000-75.000 ft), it is very rare; vast majority does not reach above 20.000 ft. They are also very hazardous to aircraft (especially those of stealth variety), with frequent lightning discharges and large hailstones ranging from 0,5 to 5 cm in diameter, which can damage aircraft’s skin.
contrails
Septemberimage10
Due to its passive nature and shorter wavelength, IRST has major advantages over radar regarding ID capabilities and ground attack performance due to increased resolution. In particular, IRST has better ability to project image of the target (to either cockpit displays or HMD), thus giving a fighter aircraft ability to ID other aircraft at longer ranges than would be possible with radar NCTR modes. IRST also has beter capability for differentiating aircraft in formation than radar does due to better angular resolution – possibly up to 40 times more accurate than radar’s. Still, IRST might have a regular magnified optical sight added for help with identification in clear weather.
Type and location of IRST is indicative of aircraft’s mission. Air superiority fighters will have dual band or longwave system positioned in front of the canopy on upper nose surface, while ground attack aircraft will have a dual band or midwave system positioned below the nose. Dual band system is preferable in both cases as it helps eliminate clutter, though it is not as beneficial for ground attack aircraft as it is for air superiority fighters.
Major advantage over the radar is that it cannot be easily jammed. As a result, actual tracking and engagement range of IRST can be expected to be greater than that of radar, even if latter has a major advantage in initial detection range. Jamming IRST with an infrared laser is a possibility (in theory), but it is very difficult if not impossible to pull off against a maneuvering aircraft. Operating modes are similar to radar: multiple target track (permitting engagement of multiple targets; similar in nature to radar’s track while scan), single target track and slaved acquisition (where IRST is slaved to another sensor, such as radar or RWR).
Being a passive sensor, IRST alone has issues with range finding. There are some workarounds. Obvious one is laser rangefinder, but being an active sensor it means that the target is warned of the impending attack (IRST still retains its passive surveillance advantage over the radar). Second one is triangulation, which can be done in several ways: datalinking two or more aircraft together, flying in a zig-zag / weaving pattern and measuring apparent target shift, or flying in straight line perpendicular to the target while doing the same. First two are usable against aircraft, while last one is only practical against ground-based targets. Target motion analysis can also be combined with atmospheric propagation model and/or apparent size of the target in order to provide a more accurate rangefinding, or these modes can be used as standalones. Radiance difference between target and the background is also a possibility. Doppler shift may be used to provide estimate of target’s speed relative to the fighters, which can be used to help with rangefinding; this is still questionable as it does not show up well at short distances, measurement may be impeded by the atmosphere, and is typically used by platforms and against targets with relatively predictable paths, which fighters are not. Exception is radar ranging, but in this case wavelength is already known beforehand to a great degree of precision. That being said, the only determinant for Doppler shift is relative speed of sensor compared to the object emitting radiation – and modern IR sensors used in astronomy can measure velocity of a star down to 1 meter per second (relative to Earth). For comparison, speed of sound at >=40.000 ft is 294,9 meters per second, and two closing fighters will be doing it at relative speeds between Mach 1,5 and 3,6. It is questionable wether Doppler shift is, or may, be used in airborne IRST.
It should be noted that while not knowing range of the target limits maximum engagement range, it does not preclude beyond visual range engagement, as missile can fly along the line of sight towards the target. This does create issues with end-game engagement, though a missile with active radar head is capable of pulling a lead, and even one with IR head might be capable of doing so albeit with less precision. Such engagement profile is in some ways superior to the classical one, as IRST’s greater angular precision will mean less possibility of a missile flying past the target without acquiring it.
Imaging IRST can also be used as a landing aid in no or poor visibility conditions (night, fog, rain etc.). While helpful for any aircraft, this is especially important for fighter and ground attack aircraft expected to operate from austere air strips.
It should be noted that IRSTs detection range is range at which probability of detection exceeds ~95% treshold, in clear-sky conditions. Actual range at which target is detected can be higher or lower. Also, heating of sensor due to friction during high-speed flight can degrade its performance somewhat.
While modern QWIP IRSTs offer the best performance, they have to be cooled to extremely low temperatures: 65 K is not uncommon. Quantum well is a potential well in which electrons are trapped. When excited, they can be ejected from the well, and produce current if external voltage is applied. QWIP photodetector / IRST can measure how much light comes from various sources by measuring the current. The longer the wavelength of light, the less energy the light has to give the electrons and the colder the detector must be to avoid excessive thermal excitations.
IRST can use scanning or staring array. Staring sensor uses one detecting element for each part of the image within field of view. This means that all detecting elements are simultaneously exposed to the image of the object, or a frame. Standard frame rate is 30 Hz, and dwell time is equal to the frame rate (1/30 of a second). Longer dwell time results in a more sensitive detector and less noise.
Scanning system can use a single element, which then sequentially scans the instantaneous field of view (determined by the aperture). Scanning system is typically a rotaring mirror. This system is cheaper than a staring array. Its output is serial as only IFOV is directed on the detector at any one time. Dwell time is determined by both frame rate and number of pixels in the image; a system with 30 Hz refresh rate and standard VGA monitor of 640×400 pixels has a dwell time of 1/7.680.000 od a second, which leads to increased noise in the system and reduced sensitivity.
(Note that a staring array still can be mounted in a turret which can scan the area in front of the aircraft).
*French Dassault Rafale has an optronics suite (IR+visual) and radar. Radar is considered primary air-to-ground sensor, while OSF is considered primary air-to-air sensor.
** F-35, a ground attack aircraft, will also typically fly at 30.000 ft during ingress/egress.
Counter-stealth performance
It is a general wisdom that IRST is of limited usefulness due to its sensitivity to adverse weather conditions. However, most modern stealth fighters (excepting the F-35 and J-31 tactical bombers) are intended to operate at high altitudes – above 50.000 ft – where ambient temperatures range from -30 to -60 degrees Celsius, which helps provide excellent contrast. Air at this altitude is also very dry, with 99,8% of the atmospheric water being below 45.000 ft. Combined with low air density and low aerosoil content, this means that there is very little atmospheric absorption of IR radiation. This applies especially to the longwave band, but detection capability is significantly improved in most bands as can be seen from the image below.
SofiaMauna
Stealth aircraft are designed to have certain IR signature reduction measures, but effectiveness of these is rather limited due to basic physics. To fly, aircraft has to overcome two basic forces: gravity and drag. Drag is created due to friction with air, compressibility effects and lift. To overcome gravity, aircraft needs lift. To generate lift, aircraft has to move forward and overcome drag. As a result, aircraft has to perform work – which creates heat. Indeed the largest IR sources on the fighter aircraft are its engines. Jet engines work by burning fuel in order to heat up huge quantities of air, which is then propelled out of the rear in order to push the aircraft forward. This leads to significant heat – engine itself is very hot (especially turbines), as is the exhaust nozzle. Engine heats up airframe surrounding it, which can be detected. Exhaust plume is also very hot, though much of the radiation is typically absorbed by the atmosphere (this depends on the altitude – refer to the image before this paragraph).
Other than the engines themselves and their exhaust, there are other sources of IR radiation. Any moving objects have to push the air out of the way. If object is fast – for example, an aircraft flying at high subsonic or supersonic speeds – air cannot move out of the way quickly enough. This leads to compression of the air in front of the aircraft, which in turn leads to heating of said air. At Mach 1,7, a supercruising fighter generates shock cones with stagnation temperature of 87 degrees Celsius. As the air moves out of the way for the aircraft, it also creates significant friction with the aircraft itself, leading to heating of the aircraft’s skin. In a jet fighter, hottest parts of the airframe other than the engine nozzles are tip of the nose, front of the canopy, as well as leading edges (of wings, tail(s) and air intakes).
hotspot_jet
As mentioned before, MiG-31 would heat up to 760 degrees Celsius during intercepts due to aerodynamic heating alone. Airframe temperature due to friction can reach 54,4 degrees Celsius at Mach 1,6 and 116,8 degrees Celsius at Mach 2,0. F-22 has two pitot tubes – one at each side of the nose – which are heated to 270* C during flight operations to prevent them from icing at high altitude. Avionics have to be cooled – especially radar. Heat exhaust is typically located at fighter’s upper surface – just behind the cockpit in Gripen, and about one canopy length behind it for the F-22. F-35 is in even worse situation since it uses fuel as a coolant, and said fuel completely surrounds its engine. This has the effect of increasing its IR signature as well as the possibility of bursting into flames if hit.
These temperatures can be compared to the ambient air (Standard US Atmosphere). F-22 achieves maximum cruise speed of Mach 1,72 at ~38.000 ft without afterburner, and maximum speed of Mach 2,0 at between 38.000 and 58.000 ft with afterburner. Above cca 53.000 ft it requires afterburner to fly, and can achieve maximum altitude of ~64.000 ft, where it is limited to maximum speed of Mach 1,6-1,8. Ambient temperature is -44,4 *C at 30.000 ft, -54,2 *C at 35.000 ft, -56,5 *C at 40.000 ft to 60.000 ft, and -55,2 *C at 70.000 ft. That is to say, difference between shock cone of a M 1,7 F-22 and ambient air will be around 130-145 * C, while temperature difference between airframe and ambient air will be cca 111 * C at Mach 1,6 and cca 172 * C at Mach 2,0.
While fighter’s IR signature can be reduced by reducing speed, such course of action also has the effect of reducing one’s own weapons range, as well as making a rear-quarter surprise more likely. In either case, fighter will get detected by modern QWIP IRST before it reaches missile effective range (10-40 km for AIM-120D at most, and can be as low as 2 km).
It is possible to apply IR absorbent paints to a fighter in order to reduce IR emissions from systems inside it. This, at best, does not have any impact on aerodynamic heating. Some IR absorbent paints cause more friction than would otherwise be the case, increasing aerodynamic heating. RAM coatings also can increase friction. While it is not a significant factor in MWIR band, LWIR detectors can detect aircraft by detecting sunshine reflections from its surfaces, such as canopy.
Modern IRST systems can even detect missile launch from its nose cone heating – this is in fact a significant advantage for IR MAWS, as UV MAWS cannot detect missiles that have spent fuel. They are also sensitive enough for planets, birds, and (in air-to-ground) barbecue grills to be sources of clutter.
Note that even if an object is at the exact same temperature as its environment, it still emits blackbody radiation, most of it at longer wavelengths.
Tactical impact
Unlike radar, IRST is primarily a passive system. This allows a fighter aircraft, or a fighter group, to detect and track the enemy without latter being aware of their presence, thus gaining a significant initial advantage in the OODA loop. Even when the enemy is aware of the fighter’s presence, he has no way of knowing wether he has been detected, or is being targeted, until a significant shift in fighters’ posture (such as painting target with a rangefinder or shifting flight path or formation). For comparison, just turning on the radar warns the aircraft in very large area of scanning fighter’s presence – and said area is far larger than one covered by the radar. Not only does it give away fighter’s presence, but if the enemy has good enough listening equipment, it is possible to triangulate location and even identify the target through its unique radar signals. Even radio communications and datalinks can serve the same purpose.
If the enemy is using radar, it is possible to use data from radar warner to generate a bearing, after which IRST can be used in a “stare” mode – continuous track, during which photon impacts are combined over prolonged timeframe to detect a target at greater distances than would normally be possible. This mode is also present in radar systems, and like IRST, radar also has to be cued by other sensors to make use of it. But while using radar in such a manner basically guarantees than the enemy with a competent RWR will detect radar transmissions, IRST is undetectable. Even a short radar burst can allow the passive fighter to generate such bearing, albeit it will somewhat limit the precision.
If radars are jammed, or more likely turned off for fear of detection, first indication of IRST-equipped fighter’s presence that the enemy aircraft will get may be alarm from a missile warning system (or radar warning system if missile is using an active seeker), thus allowing only a short time for defensive reaction. (Simulated trials of ECR-90 have shown that its airborne detection range could be cut to less than 9 kilometers by jamming). If both sides have IRST, it comes down to sensor quality and IR signature differences.
Aircraft equipped with IRST, and using IR MAWS, can remain completely silent during the mission. If the enemy has no IRST, then he will have to turn on his own radar(s), allowing the passive aircraft excellent situational awareness, well beyond what using radar in addition to IRST would allow. Further, active usage of radar will allow geolocation of radar emitters, allowing the passive fighter to use IRST to engage such targets with high precision – thus gaining a “see first, strike first” capability. IRST-equipped aircraft is also not vulnerable to anti-radiation missiles. (Note that such missiles are not very hard to make, with basically all air-to-air engagement radars being in X band).
IRSTs shortcomings can be compensated for by using datalinks to network the fighter with other assets, such as other IRST-equipped fighters and radar-equipped AWACS. As a result, radar is not the primary onboard sensor any more, and is not actually even required.
Using datalink from AWACS (though AWACS is unlikely to survive for long in a shooting war) or ground radars, fighter can then approach the enemy from side or rear, in order to prevent detection by enemy’s own radar and maximize IRSTs detection range. Once target is acquired on IRST, fighter can pursue engagement completely independently. Of course, if enemy fighter uses its own radar, no AWACS is required. It should be noted that most, possibly all, fighter aircraft today lack the datalink capable of transferring amount of data necessary for a firing solution. Even if such datalink is deployed, it will be easy to jam. As a result, fighters have to rely on onboard sensors to create a firing solution (when Rafale shot down a target at 6 o’clock, shot was done with onboard sensors and within visual range; F-35 may have a similar capability).
Large radar-based fighters – such as the F-15, F-22, Flanker variants – can act as AWACS of sorts, providing radar image to smaller IRST-only fighters, which can then use such image to achieve optimal position for a surprise attack. This in turn will allow IRST-equipped fighters to focus the IRST and achieve detection ranges larger than could normally be achieved. Even if radars are jammed, radar-based fighters should be able to roughly tell positions of enemy fighters, unless DRFM, active cancellation or standoff jamming is used. Using IRST to generate a firing solution, and then launching an IR BVRAAM or ramjet RF BVRAAM (or, ideally, a ramjet IR BVRAAM, though such missile does not exist in Western inventory) at a surprised opponent will allow far higher kill probabilities than using an obvious radar for firing solution.
Still, using an AWACS with a huge IRST plus extensive ESM arrays might allow the same tactics without a drawback of warning the enemy that he has been detected, and without suffering vulnerability to decoys and jamming that radar has. Additional advantage of such system is that its effectiveness will not be significantly degraded even against VLO targets. On the other hand, while bad weather degrades IRSTs performance, it also degrades performance of stealth coatings (assuming that stealth fighters can safely enter storm clouds), thus combining radar AWACS with IRST-equipped fighters does make some sense, as does using both types of AWACS.
IRST is the best solution for engaging stealthy aircraft and cruise missiles. As it can be seen from the previous section, is impossible to significantly reduce IR signature of a high-speed, highly maneuverable aircraft, and even low-performance aircraft that do have very extensive IR signature reduction measures are still detectable at large distances by new QWIP imaging IRSTs. Even against “legacy” aircraft its is a better choice than radar, as radar cannot separate valid contacts from decoys except at very short range – especially if it is being jammed. As a result, only IRST-equipped fighters can effectively engage modern fighters at beyond visual range.
IRST can be used as a relatively cheap way of turning an old, possibly even WVR-only, platform into one capable of BVR combat. With PIRATE + MICA IR combination, even an old F-86 would gain a capability to shoot down enemy fighters from beyond visual range (that being said, issues of low cruise speed, deficient acceleration by today’s standards and no defense suite at all would remain, and would mean that even against the F-35, F-86 would not achieve positive kill/loss ratio).
Analytic simulations indicate that an IRST-equipped aircraft will have 230% better exchange ratio than a non-IRST equipped aircraft against a “legacy” target, and 370% better against a LO target.
Specific IRST systems
PIRATE
PIRATE is used by Eurofighter Typhoon, and it entered service in 2007. Its lead contractor is Selex ES. Selex holds the bulk of Western experience in IRST systems, and is also a sole supplier of the Skyward G IRST. Thales, another member of the Eurofirst consortium, also has extensive experience in the area.
PIRATE is a dual-band system (3-5 and 8-10 microns), combining long range detection capability of the longwave IRST with high resolution and all-weather performance of midwave one. It can track more than 200 targets, and has 140* field of regard in azimuth, with -15* depression angle. Sensor head weights 48 kg, with 60 kg (?) total weight.
Detection range against a subsonic fighter-sized target is 90 km from the front and 145 km from the rear. It has an ID range of 40 km, and can track a maximum of 200 targets. It is stated to be capable of passive ranging. Its ability to provide infrared image (which can be shown on cockpit displays and HMD) can, aside for ID purposes, also be used to help with flight operation in low visibility conditions.
(Note that range figures for Western IRSTs are most likely measured/estimated against Su-27, a massive aircraft with no IR signature reduction measures.)
Skyward G
Skyward G is a new IRST intended for use in Gripen E/F, and represents a technological improvement (in both hardware and software) over older PIRATE IRST it is based on. It is a staring imaging IRST. It is also smaller, with sensor head weighting 30 kg. Like PIRATE, it is a dual-band system covering midwave and longwave infrared bands, and can provide IR image on pilot’s helmet. Scan coverage is 160* in azimuth and 60* in elevation.
Skyward is stated to be capable of detecting all aircraft flying faster than 300-400 kts from skin friction alone – irrespective of any exhaust plume or engine IR signature reduction measures. Range for such detection is unstated.
OSF
OSF is an optical sensors suite used by Dassault Rafale. It consists of an IRST sensor and a video camera. Like PIRATE, its IR sensor is dual-band, using 3-5 and 8-12 micron bands.
Detection range against a subsonic fighter-sized target is 80 km from the front and 130 km from the rear (at 20.000 ft; 110 km at low altitude). Optical camera has ID range of 45 km, while IRST has an ID range of 40 (?) km. It was reported to have locked on a turboprop Transall through thin cloud cover.
EOTS
EOTS is a staring IR sensor. Unlike above IRST systems, it is primarily intended for ground attack, as a replacement for various IR targeting pods. As a result, it is a single-channel midwave IR system, limiting its detection performance against nonafterburning targets and in air-to-air role but providing all-weather performance. It weights 200 lbs / 90,7 kg.
It is also obsolete when compared to modern IR pods used by US Navy (in particular, newest versions of Sniper and Litening pods), being more than a decade old as of 2015. In fact, it is basically an internal version of Sniper XR pod which entered service in 2006, and has low resolution and detection range when compared to the Legion pod. From Sniper XR demo, it appears that identification range is 24 kilometers against fighter aircraft, though the aircraft in question was on the ground, and 45 kilometers against an airborne business jet, showing ID performance at most comparable to PIRATE. This suggests lower maximum detection range as PIRATE likely uses midwave channel for identification, but also has longer-ranged longwave channel. That being said, actual detection range performance may be better than suggested here. Its configuration also allows it quicker scan speeds than with traditional IRSTs.
OLS-27
OLS-27 is used on Su-27 fighter, and has a maximum range of 70 km.
OLS-30
OLS-30 is used on Su-30 fighters. Maximum detection range might be as high as 90 km, and weights 200 kg.
OLS-35
OLS-35 is a scanning array IRST used on Su-35 fighters. Detection range is 50 km head on and 90 km from the rear against a subsonic fighter-sized target. It can track 4 targets. Sensor head weights 60 kg.
OLS-50
OLS-50 is IRST for T-50/PAK FA fighter. It is the first QWIP system deployed on Russian fighters, which suggests far higher detection range than earlier systems as well as the ability to identify targets.
IRST-21
IRST-21 is a podded system in use with US military. It has field of regard of +-70 degrees (140 degrees) in both azimuth and elevation, and total weight of 67-83 kg. Like other Western IRST systems (and presumably most Russian systems listed), it is capable of generating weapons-quality tracks.
Conclusion
While historically IRST had major performance issues, modern IRST systems, especially Western ones, have mostly solved these issues. As a result, IRST can be expected to become a primary sensor in any air war between competent opponents, for the same reasons as those that led to night vision googles being used for night fighting in place of flashlights.
While US Department of Defense has a very long history of being “late to the party” when it comes to introducing simple, yet effective (even transformative) systems*, US military is currently taking baby steps to rectifying its lag in development and application of airborne IR sensors. This can be clearly seen from the F-35s inbuilt IRST (though that decision was only made on insistence of US Navy, which was also the first service to introduce the Legion pod, and generally has better understanding of passive IR systems than USAF**), and procurement of IR pods for the F-15C, F-16 and F-18 fleets. Legion pod procured is capable of generating weapons track. US Navy is also the service that initiated development of AIM-9X Block III, which is basically a BVR missile, with a range of 42 km.
One of reasons why United States have not put funds into developing IRST, and are even now using almost exclusively systems geared for air-to-ground performance that happen to have air-to-air option, is that IRST was seen as a threat to the AWACS program, and later on also to stealth fighters. Both of these were high-budget programs that USAF could not allow to disappear. With average price of 1 million USD per unit, it would take only 3,2 billion USD to equip the entire US inventory of tactical aircraft with modern IRST systems. Allowing it to threaten the multi-billion AWACS or stealth aircraft programmes was simply unacceptable.*** For this reason, USAF is still acting as if IR sensors have not advanced past Vietnam-era sensors with their range, weather and targeting limitations. Same reason is also likely behind the decision to retire the IRST-equipped F-14 just before the F-22 started entering service (F-14s were retired in mid-2006, while the F-22 started entering service in 2007).
This might be changing as USAF agressors are starting to use IR sensors during Red Flag exercises.
* Examples are assault rifles, carrier catapults, IR sensors, helmet mounted sights, HOBS IR missiles.
** US Navy was also the first service to deploy IR Sidewinder missile in 1956. US Air Force deployed a Falcon missile the same year, but it had both IR and RF variant, and unlike Sidewinder, it was primarily intended for bomber self-defense and not for usage on fighters. Even though it was later deployed on fighter aircraft as well, USN Sidewinder proved superior and became preeminent US IR air-to-air missile.
*** E-3 Sentry program cost is 26,73 billion USD, F-22 program cost is 79,48 billion USD and F-35 program cost is estimated at 323 billion USD, though it is likely to be higher.

Stealthflanker- Posts : 1459
Points : 1535
Join date : 2009-08-04
Age : 36
Location : Indonesia
- Post n°13
 A simplified method for approximation of IRST range.
A simplified method for approximation of IRST range.
![]() Stealthflanker Mon Nov 12, 2018 12:45 pm
Stealthflanker Mon Nov 12, 2018 12:45 pm
A simplified method for approximation of IRST range.
Greetings. As the title said, here i would like to present and discuss about a simplified approach to approximate detection range of an IRST.
I feel that this is a necessary topics mainly because so far, no real quantitative comparison or even discussion exist. Every Optical sensor equipment manufacturer usually only mention range without having a real standard on what target being used and testing environment.
Standardized target and environment is i see of a paramount importance if we wish to say or compare if product from A is better than B. Another problem is scarcity of information as we see no one really disclose the necessary variables like the specific detectivity of their respective detector element. Therefore i view that, despite the availability of the full equation. The approach must be :
1.Simple and can work with what is available to the user
2.Robust, means that it allows wide coverage, say estimating target infra red signature in any IR band of choice.
3.Easily run in any platform having spreadsheet capability without requiring any special add ons (well gotta admit i might need to learn how to use Google spreadsheet)
The method i am using here is basically a simplified version of IR range equation presented in E.Fleeman's Tactical missile design 2nd edition. The simplified method, as like one you may see on Radar relies on inverse square law and require a reference value to work with. Here i would like to use the new OLS-35, as reference. Why ? As we see in the brochure it has range figure and a reference target.
the image is just too big so i guess a link is sufficient
https://defenseissues.files.wordpress.com/2013/12/qrkpwi.jpg
The establishment of the required variables follows the following steps :
1.Finding relevant data and establish the assumption for both target and the IRST sensor.
2.Estimate the target signature (Radiant intensity) In the working band of the IRST
3.Estimate the environment factor (Transmittance of working waveband of the IRST)
4.Calculate the new detection range based on the reference value established in num 1 procedure
and a bit of detail on each steps :
1.Finding relevant data and establish the assumption for both target and the IRST sensor.
Here we will use one example of OLS-35. Which have following data :
Range
Frontal aspect : 50 Km
Rear aspect : 90 Km
Working waveband : about 8-12 micron
Reference target : Su-30.
The assumption is as follows :
1.Altitude of 12000 meters
2.Atmospheric Transmission of 90-100%
3.Frontal area is assumed. Thus expected signature is coming from the kinetic friction between the airframe and surrounding air
4.TAS of M 0.9
Now we wish to calculate the range of the OLS against an F-22 Raptor
Since the radiant intensity or the intensity of the target of an IRST system related directly to the exposed area
and temperature of the target, those two variables are of paramount importance. Thus we will start by first making a
relevant measurement to obtain the area of both target and the reference system. The calculation for the area of target
is detailed in the "how to use" sheet in the spreadsheet. Which yield the following result :
Su-30 exposed area : 7.6886 Sqm
F-22 Raptor exposed area : 5.8114 sqm
One may ask on why i only include the fuselage area. This is because of the resolution of available imagery does not seem to be enough to conduct a more accurate assessment. Plus there are no real easy method to include or measure the projected area of the wing which need wing thickness. information which would be difficult to obtain. I consider that the fuselage alone would be sufficient.
For the calculation of detection range from the rear aspect. The IRST is assumed to be "snooping" inside the jetpipe. and the area of the infra red emmission source would be assumed to be the sum of the jetpipe frontal area.
Now that we have established the assumption and necessary variables. we can head to the 2nd step.
2.Estimate the target signature (Radiant intensity) In the working band of the IRST
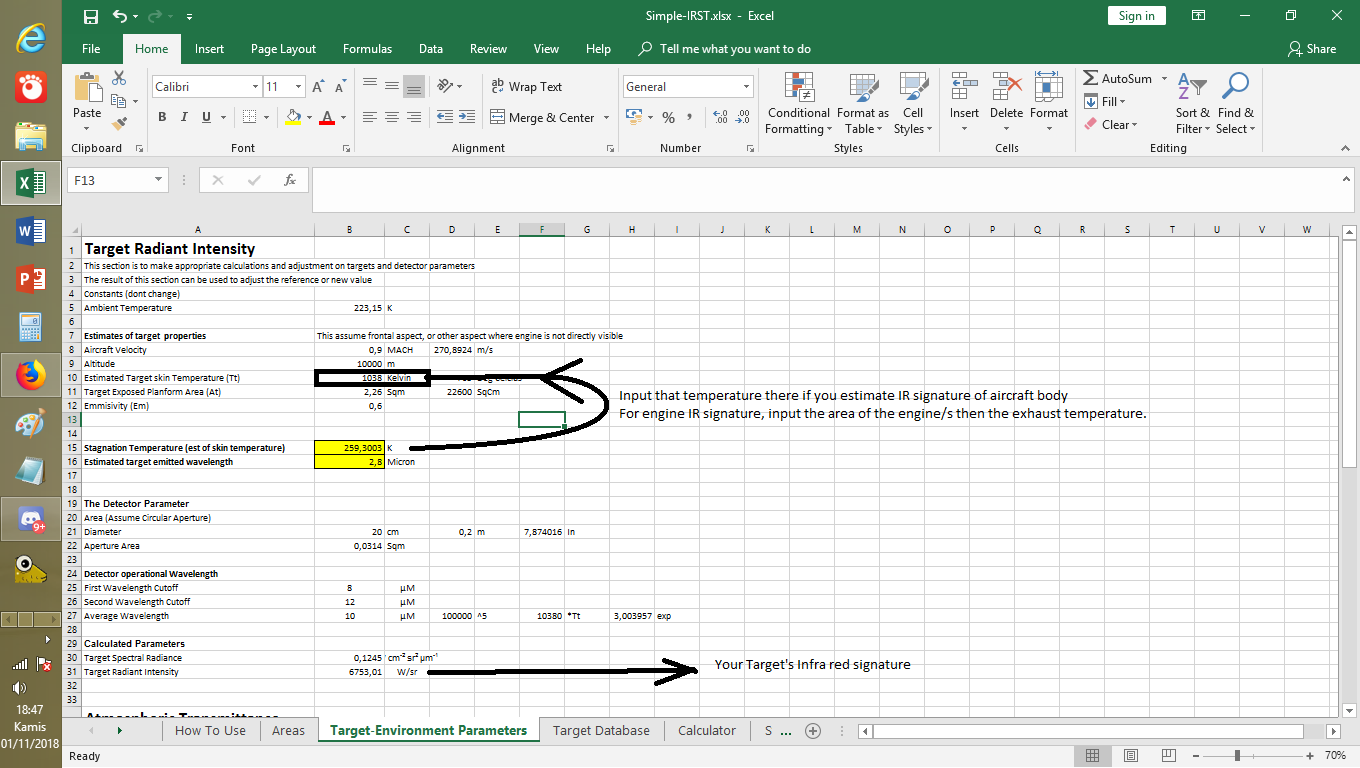
Now we need to estimate the Radiant intensity or the intensity of the energy being emitted by target on the operating wavelength of the IRST.
Here at the sheet above, you can start inputting variables like your flight speed, altitude, target exposed area and the emissivity. The recommended way to do it. Assuming that you wish to estimate target skin temperature (Not engine) Is by first input the target altitude, speed and the exposed planform area. The emissivity variable has been selected to be typical of aircraft paint, with some light gray color. You can change it to whatever suits you. Lighter color/polish will tend to have lower emissivity but highly reflective
and vice versa.
Should you wish to estimate engine jetpipe emission, you can just directly input the temperature of the exhaust temperature (The exhaust temperature here is defined right after Turbine outlet) The emissivity parameter is by default 0.6 as i dont really know what value i should use, probably 0.9 or more as the aircraft engine inside are clearly not reflective.
The second thing after inputting the necessary variable would be defining the working waveband of the IRST at "Detector Operational Wavelength" Here you can define the first cutoff of operating wavelength and the 2nd one. OLS-35 is known to have operating wavelength of 8-12 micron. Thus 8 is the first cutoff while the 2nd cutoff would be 12. Same if the detector operates in more wavelength Say 4-12 (covering both mid and long wave IR).
A target table that contains the pre-calculated value are also available. You can manually add your own target, just make sure to type the necessary assumption regarding flight speed and altitude.
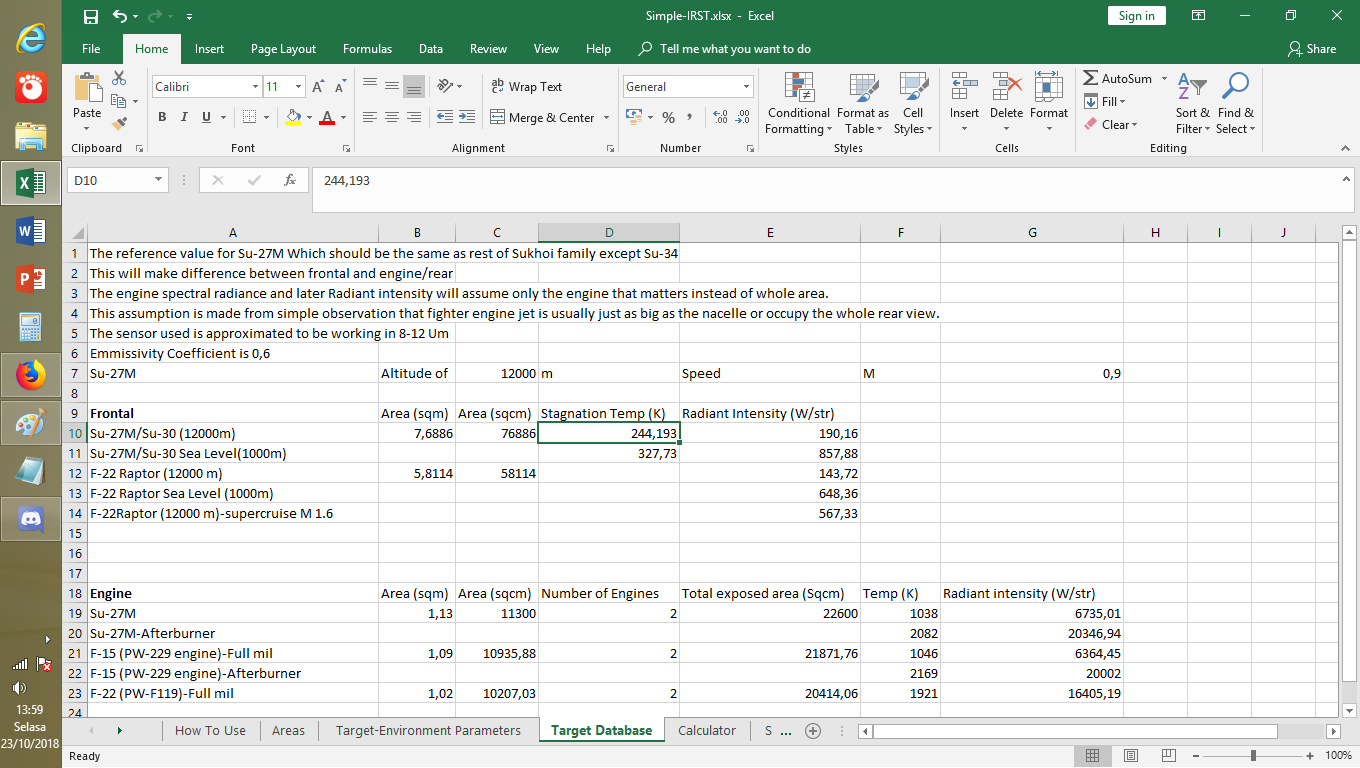
If one desire to calculate the IR signature from the rear, one simply need to enter the jetpipe temperature and the area of the engine rear face as input. If there is two engines, the area is basically both engine added.
After calculating or selecting the necessary value of IR signature (Reference and target). We can move to the 3rd step. The atmospheric.
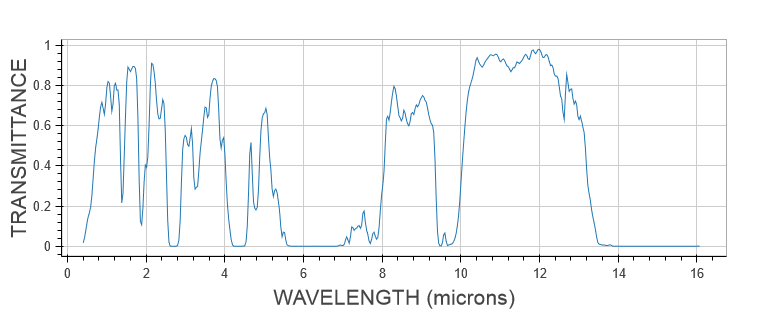
3.Estimate the environment factor (Transmittance of working waveband of the IRST)
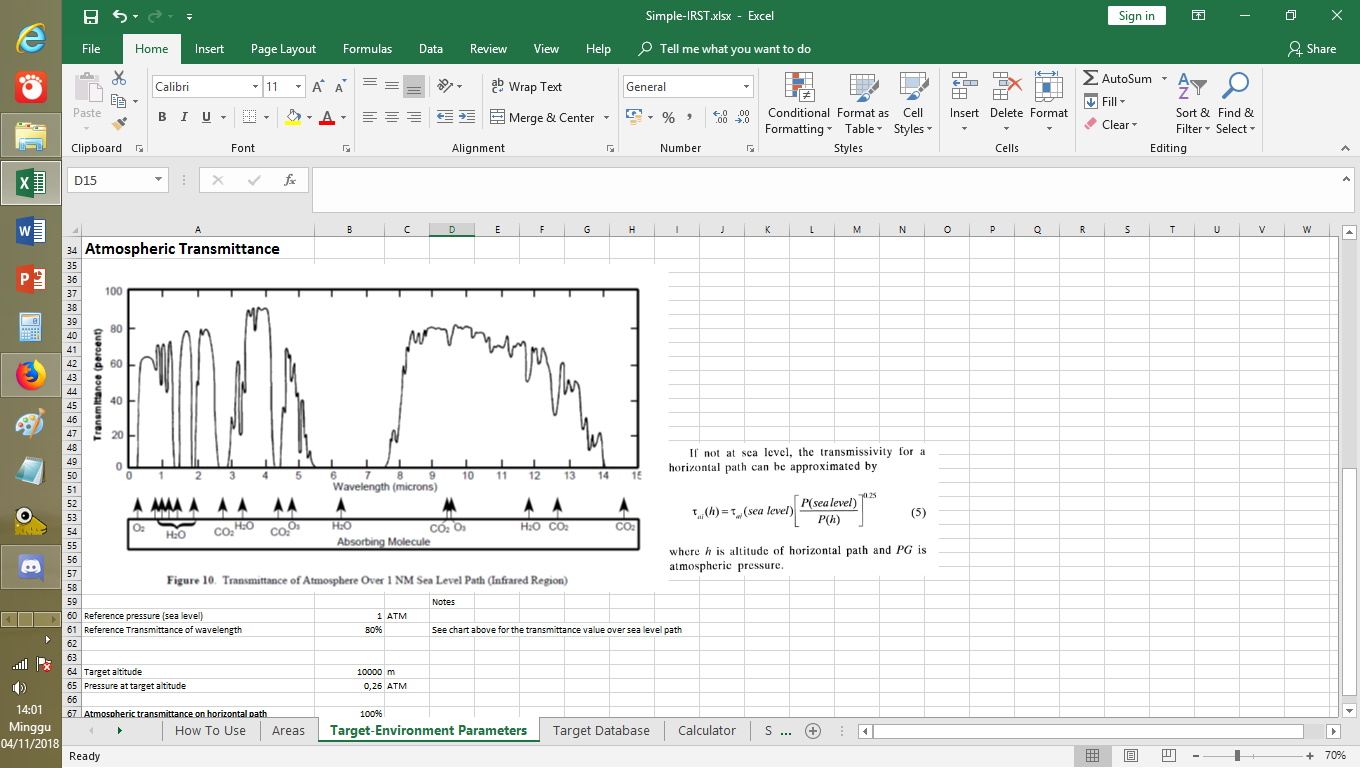
The method contained in spreadsheet is unfortunately only based on Gas as main "absorbent" for the IR wavelength. However for early approximate it should be adequate. The spreadsheet contained a chart with sea level transmittance value of IR wavelength. The altitude parameter here is tied to the altitude column (at the moment as i am still developing this sheet).
The simple sheet here will help you to estimate probable transmission of IR wavelength of your respective IRST based on altitude and reference value. The way you do that is just see the chart, draw value of your IRST working wavelength and put it in "Reference Transmittance of Wavelength" . The chart is based on sea level altitude. The target altitude is assumed to be the same as the one you inputted in the Target radiant intensity
Finally the value can be read on the coloum "Atmospheric transmittance on horizontal path".
More powerful way to estimate the transmittance factor would be by using the MODTRAN web-app
http://modtran.spectral.com/modtran_home
It allows for multiple environment factors and other variables not covered in the sheet. Regarding usage, there is one convention namely angle of view (sensor zenith). 90 degrees appears to be suitable for the aircraft, while larger values are more suitable for ground targets or reconnaissance satellite purpose.
The convention.
https://orig00.deviantart.net/8e32/f/2018/315/5/4/modtranusage_by_stealthflanker-dcrshls.png
Example usage and result
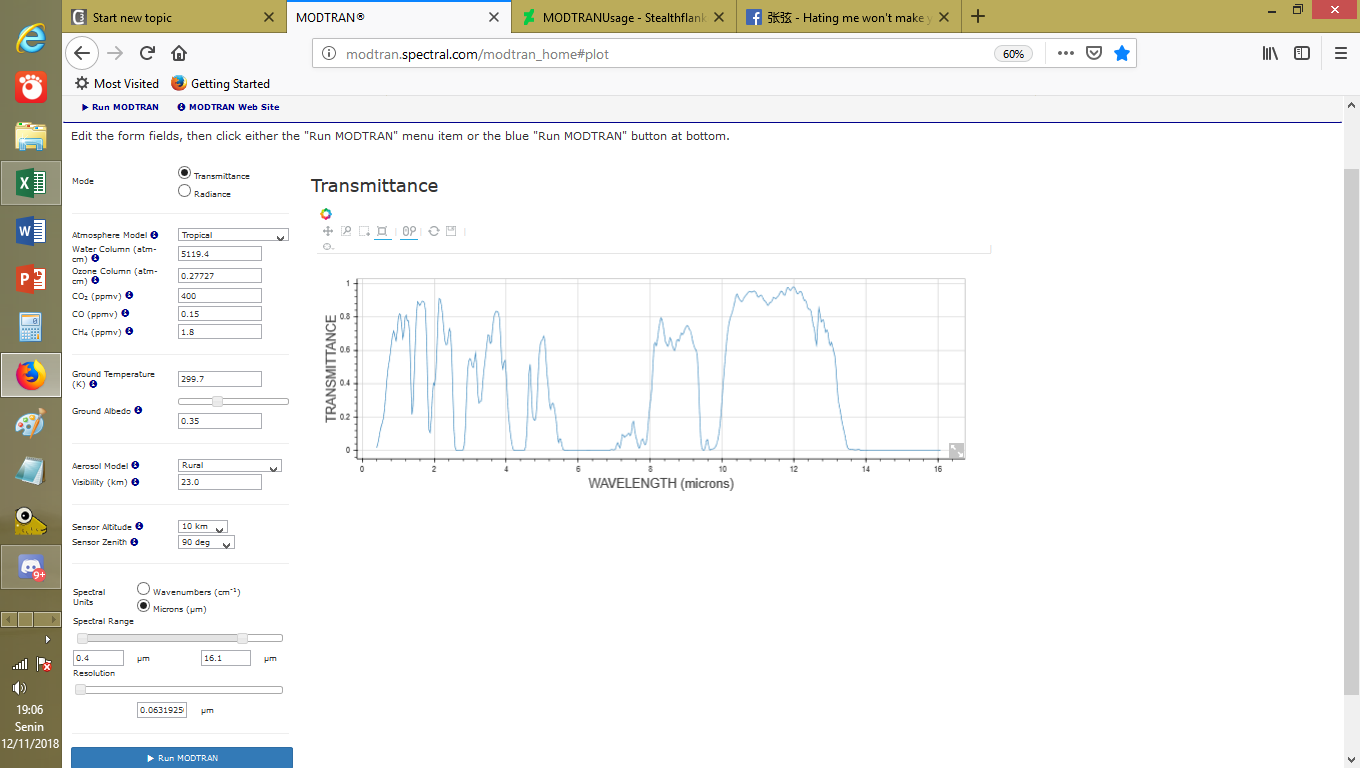
The resulting chart.
And someone may ask "Hey isnt that for 10000 m altitude while your reference value is for 12000 m ?" Then we can use the following equation to estimate the value. Except that now it use the 10000 m as reference.
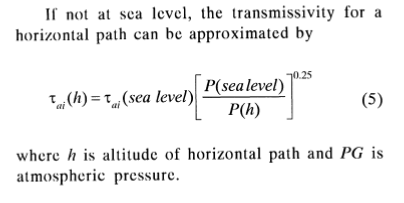
Where P is pressure and the greek alphabet Tau denotes the reference altitude's transmittance factor.
Anyway following the steps outlined above we managed to obtain the following information :
Reference Transmittance value :100%
Transmittance value at selected altitude : 100%
Basically a co-altitude situation.
The final step :
4.Calculate the new detection range based on the reference value established in num 1 procedure
This is the final step namely the range calculation. From step 1-3 we have successfully (hopefully) established the following :
Reference Value for OLS-35 Data.
IRST Aperture Area : 0,0314 sqm
Reference Spectral Radiance : 190,16 W/sr
Reference Atmospheric Transmittance : 100%
Reference Range: 50 Km
Above value is valid for 12000 meter. Now we wish to estimate the performance of the same IRST but against F-22 Raptor. At same altitude and cruising at M 0.9
Repeating the step 1-3 for Raptor yield the following data :
Range based on new parameter
IRST Aperture Diameter: 0,2 m or Area: 0,031415927 sqm
New Atmospheric transmittance: 100%
Radiant Intensity of Target: 143,72 W/sr
Then we can read the range column and we see range against the F-22 Raptor cruising at M 0.9 at altitude of 12000 m is about 43 km
How about if we wish to estimate the range against supercruising F-22 raptor at M 1.6 ? We repeat the 1-3 procedure and found that
the emitted radiant intensity would be about 567.33 W/sr. We enter the new value of the radiant intensity to the appropriate coloum
and found the detection range to be about 86,39 km.
Now one might wish to make a "what if" scenario on "how about if i can enlarge the IRST how far it can enhance range ?" one can simply change the IRST aperture diameter at "IRST Aperture Diameter" coloumn to the value of his desire. In this scenario we choose to "enlarge" the OLS-35 optical aperture to 40 cm (0.4 m) and as we see we have range of 172 Km against F-22 Raptor on Supercruise and 86 km for non supercruise mode respectively.
That is all i think i could describe for now. Hopefully this could open a new discussion and methods. The calculator can be downloaded at the end of this post. Wish you all have a great time ;D
DOWNLOAD SPREADSHEET :
https://www.mediafire.com/file/bvt80goe445kdba/Simple-IRST-Exp.xlsx/file
Greetings. As the title said, here i would like to present and discuss about a simplified approach to approximate detection range of an IRST.
I feel that this is a necessary topics mainly because so far, no real quantitative comparison or even discussion exist. Every Optical sensor equipment manufacturer usually only mention range without having a real standard on what target being used and testing environment.
Standardized target and environment is i see of a paramount importance if we wish to say or compare if product from A is better than B. Another problem is scarcity of information as we see no one really disclose the necessary variables like the specific detectivity of their respective detector element. Therefore i view that, despite the availability of the full equation. The approach must be :
1.Simple and can work with what is available to the user
2.Robust, means that it allows wide coverage, say estimating target infra red signature in any IR band of choice.
3.Easily run in any platform having spreadsheet capability without requiring any special add ons (well gotta admit i might need to learn how to use Google spreadsheet)
The method i am using here is basically a simplified version of IR range equation presented in E.Fleeman's Tactical missile design 2nd edition. The simplified method, as like one you may see on Radar relies on inverse square law and require a reference value to work with. Here i would like to use the new OLS-35, as reference. Why ? As we see in the brochure it has range figure and a reference target.
the image is just too big so i guess a link is sufficient
https://defenseissues.files.wordpress.com/2013/12/qrkpwi.jpg
The establishment of the required variables follows the following steps :
1.Finding relevant data and establish the assumption for both target and the IRST sensor.
2.Estimate the target signature (Radiant intensity) In the working band of the IRST
3.Estimate the environment factor (Transmittance of working waveband of the IRST)
4.Calculate the new detection range based on the reference value established in num 1 procedure
and a bit of detail on each steps :
1.Finding relevant data and establish the assumption for both target and the IRST sensor.
Here we will use one example of OLS-35. Which have following data :
Range
Frontal aspect : 50 Km
Rear aspect : 90 Km
Working waveband : about 8-12 micron
Reference target : Su-30.
The assumption is as follows :
1.Altitude of 12000 meters
2.Atmospheric Transmission of 90-100%
3.Frontal area is assumed. Thus expected signature is coming from the kinetic friction between the airframe and surrounding air
4.TAS of M 0.9
Now we wish to calculate the range of the OLS against an F-22 Raptor
Since the radiant intensity or the intensity of the target of an IRST system related directly to the exposed area
and temperature of the target, those two variables are of paramount importance. Thus we will start by first making a
relevant measurement to obtain the area of both target and the reference system. The calculation for the area of target
is detailed in the "how to use" sheet in the spreadsheet. Which yield the following result :
Su-30 exposed area : 7.6886 Sqm
F-22 Raptor exposed area : 5.8114 sqm
One may ask on why i only include the fuselage area. This is because of the resolution of available imagery does not seem to be enough to conduct a more accurate assessment. Plus there are no real easy method to include or measure the projected area of the wing which need wing thickness. information which would be difficult to obtain. I consider that the fuselage alone would be sufficient.
For the calculation of detection range from the rear aspect. The IRST is assumed to be "snooping" inside the jetpipe. and the area of the infra red emmission source would be assumed to be the sum of the jetpipe frontal area.
Now that we have established the assumption and necessary variables. we can head to the 2nd step.
2.Estimate the target signature (Radiant intensity) In the working band of the IRST
Now we need to estimate the Radiant intensity or the intensity of the energy being emitted by target on the operating wavelength of the IRST.
Here at the sheet above, you can start inputting variables like your flight speed, altitude, target exposed area and the emissivity. The recommended way to do it. Assuming that you wish to estimate target skin temperature (Not engine) Is by first input the target altitude, speed and the exposed planform area. The emissivity variable has been selected to be typical of aircraft paint, with some light gray color. You can change it to whatever suits you. Lighter color/polish will tend to have lower emissivity but highly reflective
and vice versa.
Should you wish to estimate engine jetpipe emission, you can just directly input the temperature of the exhaust temperature (The exhaust temperature here is defined right after Turbine outlet) The emissivity parameter is by default 0.6 as i dont really know what value i should use, probably 0.9 or more as the aircraft engine inside are clearly not reflective.
The second thing after inputting the necessary variable would be defining the working waveband of the IRST at "Detector Operational Wavelength" Here you can define the first cutoff of operating wavelength and the 2nd one. OLS-35 is known to have operating wavelength of 8-12 micron. Thus 8 is the first cutoff while the 2nd cutoff would be 12. Same if the detector operates in more wavelength Say 4-12 (covering both mid and long wave IR).
A target table that contains the pre-calculated value are also available. You can manually add your own target, just make sure to type the necessary assumption regarding flight speed and altitude.
If one desire to calculate the IR signature from the rear, one simply need to enter the jetpipe temperature and the area of the engine rear face as input. If there is two engines, the area is basically both engine added.
After calculating or selecting the necessary value of IR signature (Reference and target). We can move to the 3rd step. The atmospheric.
3.Estimate the environment factor (Transmittance of working waveband of the IRST)
The method contained in spreadsheet is unfortunately only based on Gas as main "absorbent" for the IR wavelength. However for early approximate it should be adequate. The spreadsheet contained a chart with sea level transmittance value of IR wavelength. The altitude parameter here is tied to the altitude column (at the moment as i am still developing this sheet).
The simple sheet here will help you to estimate probable transmission of IR wavelength of your respective IRST based on altitude and reference value. The way you do that is just see the chart, draw value of your IRST working wavelength and put it in "Reference Transmittance of Wavelength" . The chart is based on sea level altitude. The target altitude is assumed to be the same as the one you inputted in the Target radiant intensity
Finally the value can be read on the coloum "Atmospheric transmittance on horizontal path".
More powerful way to estimate the transmittance factor would be by using the MODTRAN web-app
http://modtran.spectral.com/modtran_home
It allows for multiple environment factors and other variables not covered in the sheet. Regarding usage, there is one convention namely angle of view (sensor zenith). 90 degrees appears to be suitable for the aircraft, while larger values are more suitable for ground targets or reconnaissance satellite purpose.
The convention.
https://orig00.deviantart.net/8e32/f/2018/315/5/4/modtranusage_by_stealthflanker-dcrshls.png
Example usage and result
The resulting chart.
And someone may ask "Hey isnt that for 10000 m altitude while your reference value is for 12000 m ?" Then we can use the following equation to estimate the value. Except that now it use the 10000 m as reference.
Where P is pressure and the greek alphabet Tau denotes the reference altitude's transmittance factor.
Anyway following the steps outlined above we managed to obtain the following information :
Reference Transmittance value :100%
Transmittance value at selected altitude : 100%
Basically a co-altitude situation.
The final step :
4.Calculate the new detection range based on the reference value established in num 1 procedure
This is the final step namely the range calculation. From step 1-3 we have successfully (hopefully) established the following :
Reference Value for OLS-35 Data.
IRST Aperture Area : 0,0314 sqm
Reference Spectral Radiance : 190,16 W/sr
Reference Atmospheric Transmittance : 100%
Reference Range: 50 Km
Above value is valid for 12000 meter. Now we wish to estimate the performance of the same IRST but against F-22 Raptor. At same altitude and cruising at M 0.9
Repeating the step 1-3 for Raptor yield the following data :
Range based on new parameter
IRST Aperture Diameter: 0,2 m or Area: 0,031415927 sqm
New Atmospheric transmittance: 100%
Radiant Intensity of Target: 143,72 W/sr
Then we can read the range column and we see range against the F-22 Raptor cruising at M 0.9 at altitude of 12000 m is about 43 km
How about if we wish to estimate the range against supercruising F-22 raptor at M 1.6 ? We repeat the 1-3 procedure and found that
the emitted radiant intensity would be about 567.33 W/sr. We enter the new value of the radiant intensity to the appropriate coloum
and found the detection range to be about 86,39 km.
Now one might wish to make a "what if" scenario on "how about if i can enlarge the IRST how far it can enhance range ?" one can simply change the IRST aperture diameter at "IRST Aperture Diameter" coloumn to the value of his desire. In this scenario we choose to "enlarge" the OLS-35 optical aperture to 40 cm (0.4 m) and as we see we have range of 172 Km against F-22 Raptor on Supercruise and 86 km for non supercruise mode respectively.
That is all i think i could describe for now. Hopefully this could open a new discussion and methods. The calculator can be downloaded at the end of this post. Wish you all have a great time ;D
DOWNLOAD SPREADSHEET :
https://www.mediafire.com/file/bvt80goe445kdba/Simple-IRST-Exp.xlsx/file

jhelb- Posts : 1095
Points : 1196
Join date : 2015-04-04
Location : Previously: Belarus Currently: A Small Island No One Cares About
Stealthflanker wrote:
Now one might wish to make a "what if" scenario on "how about if i can enlarge the IRST how far it can enhance range ?" one can simply change the IRST aperture diameter at "IRST Aperture Diameter" coloumn to the value of his desire. In this scenario we choose to "enlarge" the OLS-35 optical aperture to 40 cm (0.4 m) and as we see we have range of 172 Km against F-22 Raptor on Supercruise and 86 km for non supercruise mode respectively.
This is great Stealthflanker. I just want to say - in some specific circumstances certain fighter aircraft like Mig 31 can detect enemy aircraft at longer range with its IRST than it could with its radar.
nemrod- Posts : 839
Points : 1333
Join date : 2012-09-11
Age : 59
Thx Very much friend for your amazing work -it went towards my precious archives-. We/You -mostly :-) - calculate, evaluate, think about data that are officially available for the public as we are. However there are too much others data that are totally classified, neither you, or anyone else could access. A thing is absoluterly certain, russians, as chineses can detect any US stealth aircraft everywhere in the world at hundreds km. The technology currently available on OLS-35 is already old, and completely outclassed, there are many new assets that russians do have. US stealth aircraft are no longer a threat neither for Russia, nor China. US are fearing this situation and recently they raised an alarm. The Gen Joseph Votel in front of the senate committee clearly accused russian hardware to threaten US ability to dominate -that in fact never existed. If they did have temporary superiority it was because Russia and China agreed with US- the skies.Stealthflanker wrote:
Then we can read the range column and we see range against the F-22 Raptor cruising at M 0.9 at altitude of 12000 m is about 43 km
How about if we wish to estimate the range against supercruising F-22 raptor at M 1.6 ? ... found the detection range to be about 86,39 km.
Now one might wish to make a "what if" scenario on "how about if i can enlarge the IRST how far it can enhance range ?" one can simply change the IRST aperture diameter at "IRST Aperture Diameter" coloumn to the value of his desire. In this scenario we choose to "enlarge" the OLS-35 optical aperture to 40 cm (0.4 m) and as we see we have range of 172 Km against F-22 Raptor on Supercruise and 86 km for non supercruise mode respectively.
That is all i think i could describe for now. Hopefully this could open a new discussion and methods. The calculator can be downloaded at the end of this post. Wish you all have a great time ;D
https://sputniknews.com/military/201802281062078380-us-general-russia-threaten-dominance/
The total report.
https://docs.house.gov/meetings/AS/AS00/20180227/106870/HHRG-115-AS00-Wstate-VotelJ-20180227.pdf
Clearly the gen Votel mean the S-300/400 beside the Tor, Buk and others embedded radars and sensors on Migs and Sukhoi, and of course the Pantisr . This last is particularly feared by all US aircraft, because it is nearly certain that it can detect a stealth at at least more than 100 km, leaving none chance for any target. The more sophisticated system can detect any aircraft at more than several hundreds km. Martyanov told me recently in his blog that Russia built up new generation of radars against stealth aircraft for a while. There are using radio photonic technology, that is nearly impossible to jam. These radio photonic radars will be embedded next -around early 2020's -on the new generation of SU-30/35, Mig-35 and of course the Mig-31.

ahmedfire- Posts : 2366
Points : 2548
Join date : 2010-11-11
Location : The Land Of Pharaohs
Soviets built in most of their targeting systems inside their aircrafts which were dedicated for ground strikes .
Is this by any way limited the attack angles ?
I was reading this article from Carlo Kopp and found the below quote
http://www.ausairpower.net/APA-Fullback.html
Then i found the below link from 2008
Russian fighters to use Thales Damocles targeting pods
Second question :
Aircraft A has IRST and EO systems like SU-35
Aircraft B has IRST and EO system but also using outer pod
Is using the outer pod gives a more cabability along with IRST and EO ?
Is this by any way limited the attack angles ?
I was reading this article from Carlo Kopp and found the below quote
The ventral electro-optical targeting system provides a limited capability and is only suitable for medium/high level deliveries, due to its limited field of regard. It is likely to be soon supplemented by a licence built Thales Damocles thermal imaging and laser targeting pod. Russian sources claim that the Russian MoD licenced the pod design, expected to be built by the Ural Optical Mechanical Plant (UOMZ), after exposure to the design during the integration of the pod on the Malaysian Su-30MKM Flanker H. Future candidates for the pod, other than the Su-34, are the Su-35-1/35BM Flanker F, the Su-27SM/SMK Flanker B+ and upgraded Su-24M2 Fencer. The pylon installation, given hardware commonality between the SU-30MK and Su-34, is likely to be identical for both types.
http://www.ausairpower.net/APA-Fullback.html
Then i found the below link from 2008
Russian fighters to use Thales Damocles targeting pods
Second question :
Aircraft A has IRST and EO systems like SU-35
Aircraft B has IRST and EO system but also using outer pod
Is using the outer pod gives a more cabability along with IRST and EO ?
GarryB- Posts : 40487
Points : 40987
Join date : 2010-03-30
Location : New Zealand
AFAIK they are developing their own targeting pods, there is one being developed by MiG for the MiG-35 which could also presumably be used by other models of the MiG-29 family, and for the Su-57/35/34 family.
There are a range of recon pods they already have developed that are carried by Su-24MP and Tu-22M and Il-76 EW aircraft types, but they are also developing jammer and recon pods for the Su-34 as well AFAIK...
Regarding attack angles for fixed internal sighting systems generally the internal systems have fields of view and angle capacities that exceed the weapons carried...
In some cases the aircraft carrying a laser guided bomb might not be marking the target itself even though it has a laser target marker...
You have to be careful regarding Mr Kopps information... not that he is biased too much... he is generally very open minded when it comes to Soviet and Russian equipment, but a bit like me he likes to speculate and does it so often sometimes he assumes his speculations are probably true.
For instance the tradition of multi sensor air to air missiles and missile families is something the Soviets liked to do... the R-27 family in particular is enormous... and so speculation about ramjet powered R-77s and IR guided R-77s is tempting despite a complete lack of actual hard evidence...
Sometimes things are made worse by people having a laugh... I remember seeing a photo of an Mi-24 hind armed with an R-60 Aphid missile on an underwing pylon... the ground crew were having a laugh... for years afterwards it was believed they used such weapons on Hinds... which was not true of course.
There are a range of recon pods they already have developed that are carried by Su-24MP and Tu-22M and Il-76 EW aircraft types, but they are also developing jammer and recon pods for the Su-34 as well AFAIK...
Regarding attack angles for fixed internal sighting systems generally the internal systems have fields of view and angle capacities that exceed the weapons carried...
In some cases the aircraft carrying a laser guided bomb might not be marking the target itself even though it has a laser target marker...
You have to be careful regarding Mr Kopps information... not that he is biased too much... he is generally very open minded when it comes to Soviet and Russian equipment, but a bit like me he likes to speculate and does it so often sometimes he assumes his speculations are probably true.
For instance the tradition of multi sensor air to air missiles and missile families is something the Soviets liked to do... the R-27 family in particular is enormous... and so speculation about ramjet powered R-77s and IR guided R-77s is tempting despite a complete lack of actual hard evidence...
Sometimes things are made worse by people having a laugh... I remember seeing a photo of an Mi-24 hind armed with an R-60 Aphid missile on an underwing pylon... the ground crew were having a laugh... for years afterwards it was believed they used such weapons on Hinds... which was not true of course.

Isos- Posts : 11592
Points : 11560
Join date : 2015-11-06
For instance the tradition of multi sensor air to air missiles and missile families is something the Soviets liked to do... the R-27 family in particular is enormous... and so speculation about ramjet powered R-77s and IR guided R-77s is tempting despite a complete lack of actual hard evidence...
It's not speculation. Ramjet powered r-77 was designed and they presented it in a airshow. But there isn't IR version which can be explain by the fact that r-77 complete the r27 instead of replacing it because it lacked an active radar version while the other version were very good and also by the fact that the first model was not good enough and the r-771 was introduced by russian air force and not soviet air force. The development was stoped because of USSR fall.
Now we will see what they will do with r-77M.
ahmedfire- Posts : 2366
Points : 2548
Join date : 2010-11-11
Location : The Land Of Pharaohs
Regarding attack angles for fixed internal sighting systems generally the internal systems have fields of view and angle capacities that exceed the weapons carried...
I guess if it was like that ,we would see the SU-35 and MIG-35 with complete internal system like the previous soviet aircrafts . Sapsan-E thermal imaging and laser targeting pod will be carried externally .
In some cases the aircraft carrying a laser guided bomb might not be marking the target itself even though it has a laser target marker...
I guess you mean in case of bad weather or any thing that can obstacle the laser beam .
But i'm talking about the design itself , the embedded targeting systems inside a supersonic aircraft will increase the cost , the pilot may needs also to change the angles to keep the target illuminated .
GarryB- Posts : 40487
Points : 40987
Join date : 2010-03-30
Location : New Zealand
I guess if it was like that ,we would see the SU-35 and MIG-35 with complete internal system like the previous soviet aircrafts . Sapsan-E thermal imaging and laser targeting pod will be carried externally .
It is likely the Su-35 and MiG-35 and other models will eventually get targeting pods as their IRST systems are optimised for aerial targets but not targets on the ground.
The Su-34 has built in systems but may also use pods if they become sophisticated enough.
I guess you mean in case of bad weather or any thing that can obstacle the laser beam .
But i'm talking about the design itself , the embedded targeting systems inside a supersonic aircraft will increase the cost , the pilot may needs also to change the angles to keep the target illuminated .
Russian and Soviet laser guided weapons are not like western systems... it is also not a case of pointing a 152mm gun in the general direction of a target and then lasing the target and the shell will automatically hit.
Basically the target marker will generate the targets coordinates and physical location and communicating with the launch platform (artillery piece or aircraft) it will calculate the angle and direction the shell needs to be fired or the altitude and speed and direction the bomb must be released from to actually hit the target... the launch platform with then signal the target marker when the round is launched/released and then the computer attached to the laser target marker counts down the flight time and then about 3 seconds before impact the laser turns on and the incoming weapon corrects its path and hits the target.
A target like a tank with laser sensors given 3 seconds warning would have trouble deploying an effective smoke screen to hide...
For direct fire laser guided weapons the lasing time is one second, so laser homing rockets use the last one second of flight time to correct to hit the target...
Note laser beam riding missiles are something totally different...
ahmedfire- Posts : 2366
Points : 2548
Join date : 2010-11-11
Location : The Land Of Pharaohs
the computer attached to the laser target marker counts down the flight time and then about 3 seconds before impact the laser turns on and the incoming weapon corrects its path and hits the target.
Here the laser is coming from the target marker which is fitted inside the aircraft ..right ? if yes then we will again go back to the angle of that marker at that moment .

limb- Posts : 1550
Points : 1576
Join date : 2020-09-17
How has the Russian IRST tech progressed? Is it still the world leader?
I read that the French PIRATE IRST has 150+km detection range at front aspect, but I can't find any info on the latest Russian IRSTs.
Also general russian IR imaging tech thread
I read that the French PIRATE IRST has 150+km detection range at front aspect, but I can't find any info on the latest Russian IRSTs.
Also general russian IR imaging tech thread
Isos- Posts : 11592
Points : 11560
Join date : 2015-11-06
PIRATE is for Eurofighter Typhion. Not french at all.
French have the OSF for the Rafale.
Su-35 IRST has a 90km range (for export). IIRC it is the same tech as the one on Rafale.
It will be quite difficult to compare and find open data on them. That's quite secret. Only countries operaring bith system can make real comparison like Egypt or India.
French have the OSF for the Rafale.
Su-35 IRST has a 90km range (for export). IIRC it is the same tech as the one on Rafale.
It will be quite difficult to compare and find open data on them. That's quite secret. Only countries operaring bith system can make real comparison like Egypt or India.
GarryB- Posts : 40487
Points : 40987
Join date : 2010-03-30
Location : New Zealand
As mentioned it is pretty hard to compare really but I would suggest one factor you would need to keep in mind... detecting a target at 150km range is a useful thing but if it is stealthy and your radar guided missiles can't get a lock what are you going to do about it?
AFAIK only the French and Russian aircraft have heavy long range IR guided AAMs that could take advantage of such systems.
Obviously detection distance is totally dependent on the target... I would suggest a super cruising target would be easier to spot at range because of the altitude and friction heating.
I seem to remember that the MiG-25 was able to detect SR-71s with IRSTs at ranges greater than their radar could detect them, which was well over 150km, but not many other objects have that sort of flight profile.
The R-40TD was designed specifically for head on shots at SR-71s and potential mach 3 bombers...
AFAIK only the French and Russian aircraft have heavy long range IR guided AAMs that could take advantage of such systems.
Obviously detection distance is totally dependent on the target... I would suggest a super cruising target would be easier to spot at range because of the altitude and friction heating.
I seem to remember that the MiG-25 was able to detect SR-71s with IRSTs at ranges greater than their radar could detect them, which was well over 150km, but not many other objects have that sort of flight profile.
The R-40TD was designed specifically for head on shots at SR-71s and potential mach 3 bombers...